Prototype
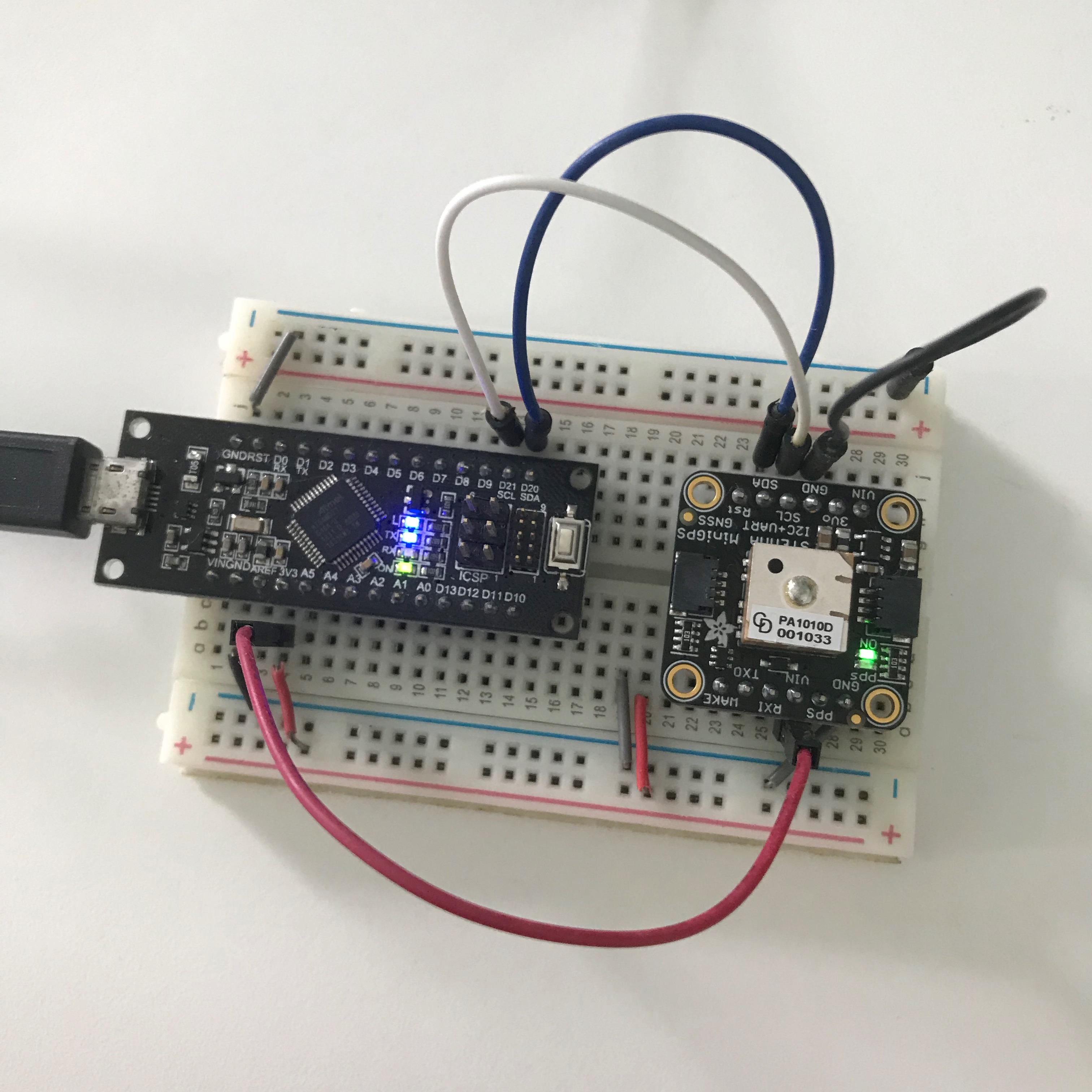
A photo of the actual setup.
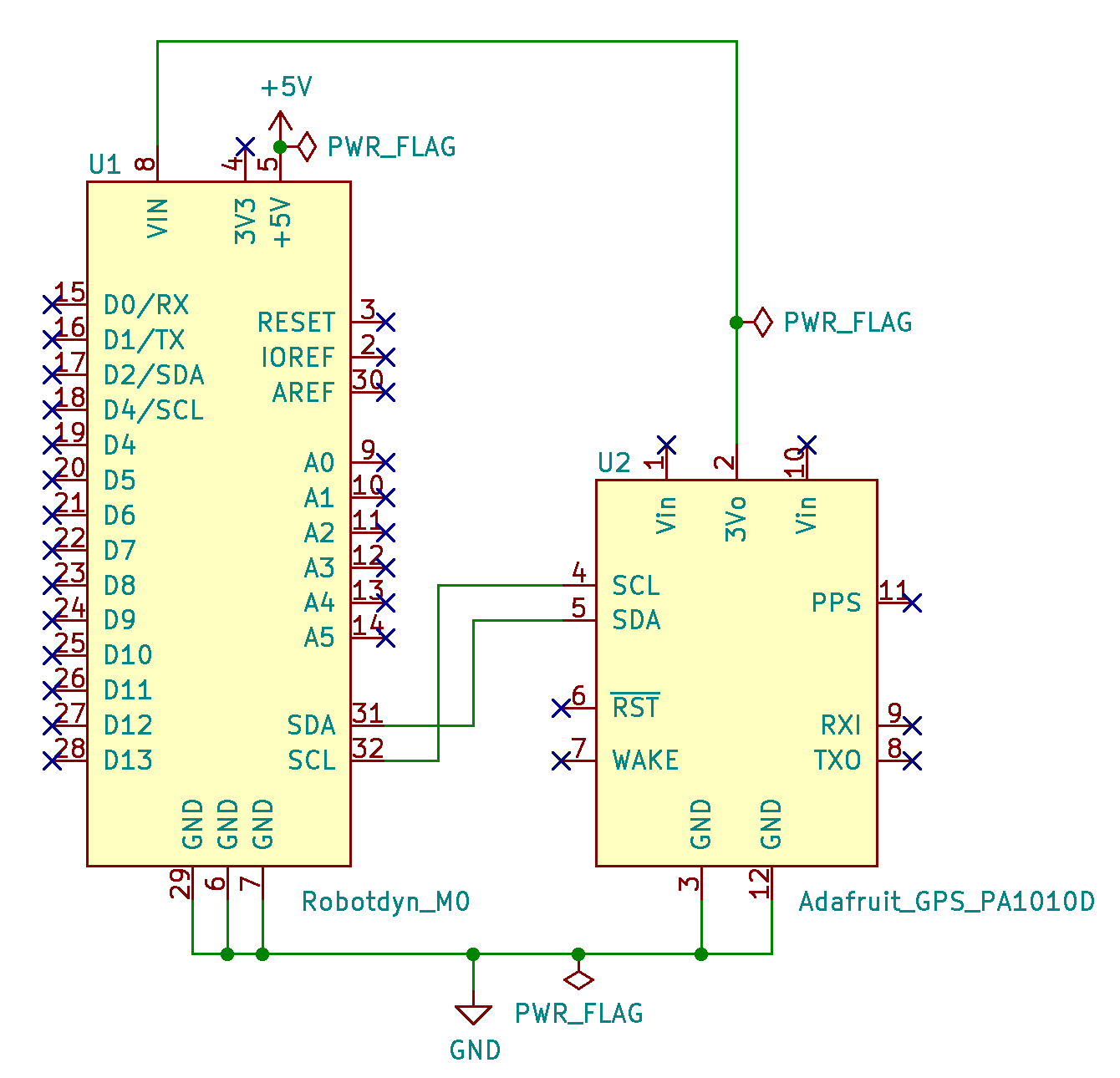
Schematic
Wire up the hardware accordingly
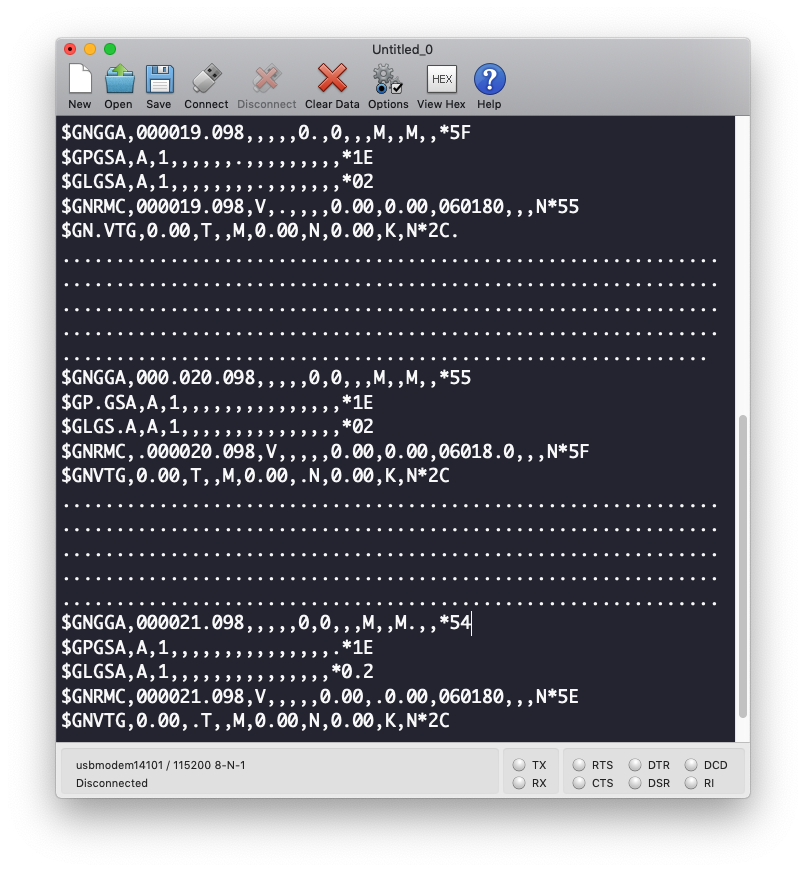
Serial console
Serial output from the firmware.
Dependancies
Pre-requisites
Buy the components
gps-pa1010d-m0-i2c.ino
#include <Adafruit_GPS.h>
Adafruit_GPS GPS(&Wire);
void setup() {
while (!Serial) {}
SerialUSB.begin(115200);
SerialUSB.println("Hello GPS test with I2C!");
GPS.begin(0x10); // The I2C address to use is 0x10
}
void loop() {
if (SerialUSB.available()) {
char c = SerialUSB.read();
GPS.write(c);
}
if (GPS.available()) {
char c = GPS.read();
SerialUSB.write(c);
}
}BOARD?=arduino:samd:mzero_bl
PORT := $(shell ls /dev/cu.usbmodem*)
.PHONY: default lint all flash clean
default: lint all flash clean
lint:
cpplint --extensions=ino --filter=-legal/copyright,-readability/casting *.ino
all:
arduino-cli compile --fqbn $(BOARD) ./
flash:
arduino-cli upload -p $(PORT) --fqbn $(BOARD) ./
clean:
rm -f .*.bin
rm -f .*.elf
rm -f .*.hexA photo of the actual setup.
Wire up the hardware accordingly
Serial output from the firmware.
Use Adafruit GPS module PA1010D with Arduino M0 (with micro-controller SAMD21G) to display parsed GPS data via the I2C protocol.
{kind=link}