Measure battery voltage
Measure LiPo battery voltage
🌳 An outdoor LoRa-GPS tracker with an E-Ink display 🔑
Measure LiPo battery voltage
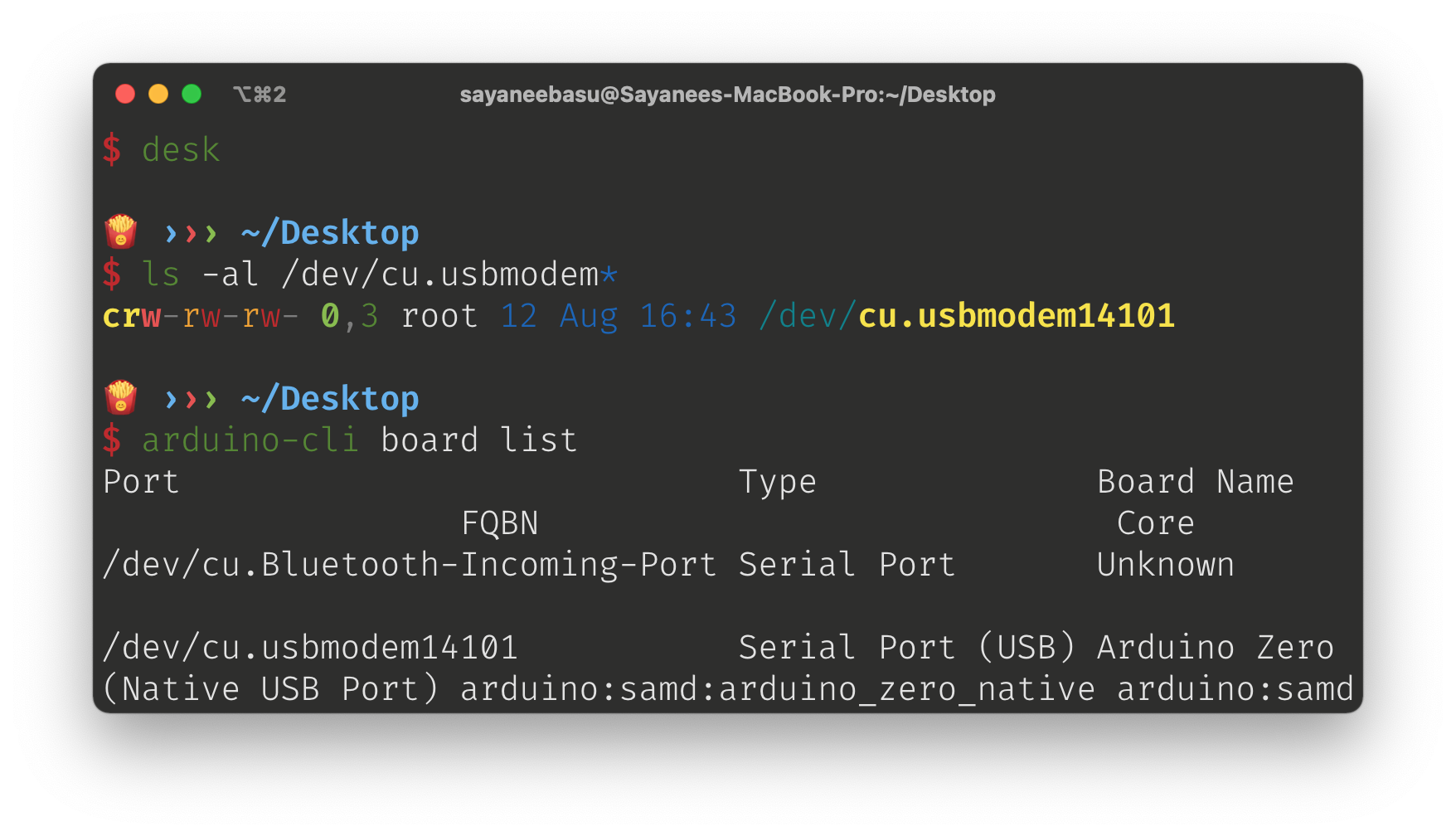
ls -al /dev/cu.usbmodem and arduino-cli board list. Run make to compile and upload the code to the board.
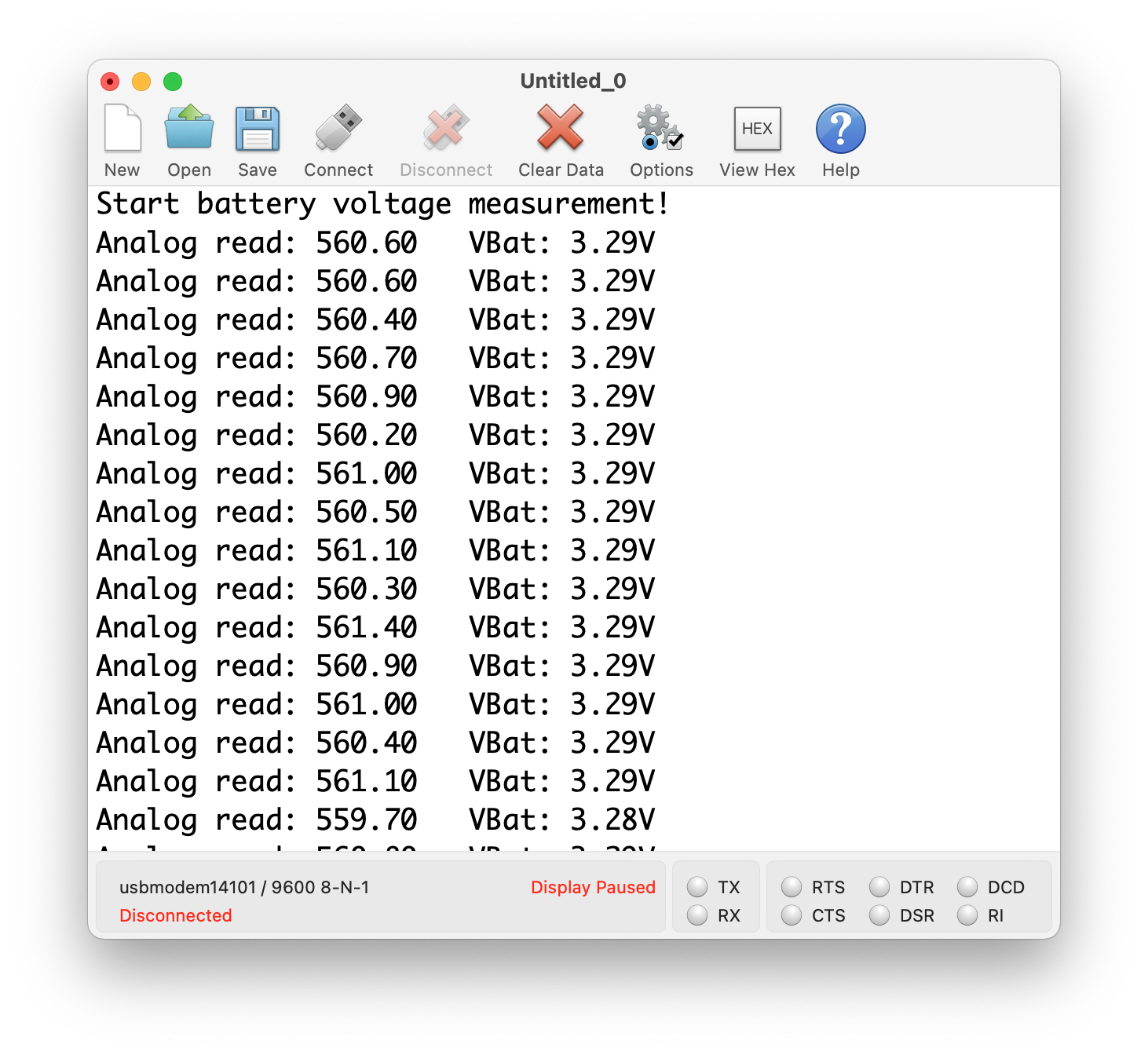
Serial output from the firmware.
#define VBATPIN A0
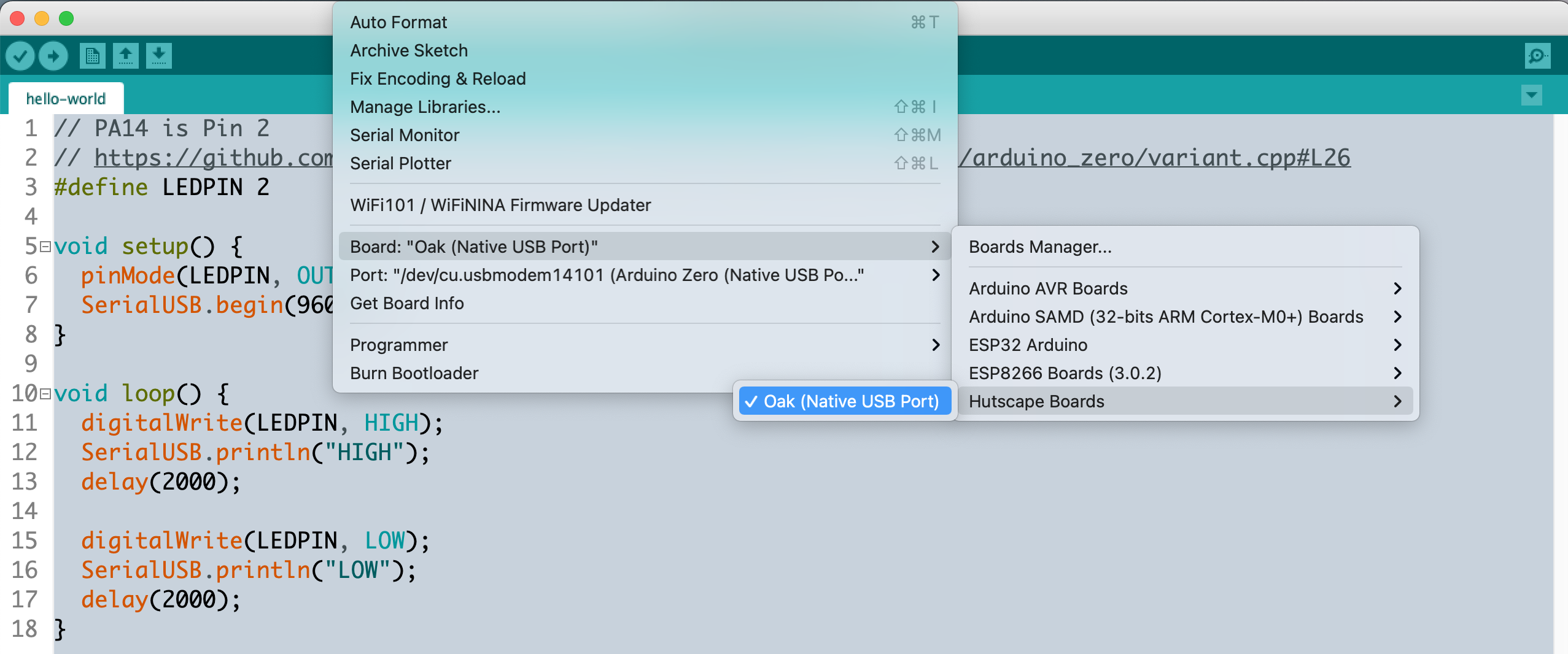
#define LEDPIN 2
void setup() {
pinMode(LEDPIN, OUTPUT);
SerialUSB.begin(9600);
delay(1000);
SerialUSB.println("Start battery voltage measurement!");
}
void loop() {
float measuredvbat = analogRead(VBATPIN);
for (int i = 0; i < 10; i++) {
measuredvbat += analogRead(VBATPIN);
delay(10);
}
// Take the average of 10 analog values
measuredvbat /= 10;
SerialUSB.print("Analog read: ");
SerialUSB.print(measuredvbat);
// Potential divider of equal resistance
measuredvbat *= 2;
// Or the reference voltage E.g. 2.8V, 3.3V, 5V, 3.7V
measuredvbat *= 3.3;
// Measured digital value with multimeter (instead of 1024)
// Convert to voltage
measuredvbat /= 1125;
SerialUSB.print(" VBat: ");
SerialUSB.print(measuredvbat);
SerialUSB.println("V");
digitalWrite(LEDPIN, HIGH);
SerialUSB.println("HIGH");
delay(2000);
digitalWrite(LEDPIN, LOW);
SerialUSB.println("LOW");
delay(2000);
}BOARD?=hutscape:samd:oak
PORT := $(shell ls /dev/cu.usbmodem*)
BUILD=build
.PHONY: default lint all flash clean
default: lint all flash clean
lint:
cpplint --extensions=ino --filter=-legal/copyright,-whitespace/line_length,-readability/casting,-readability/todo *.ino
all:
arduino-cli compile --fqbn $(BOARD) --output-dir $(BUILD) ./
flash:
arduino-cli upload -p /dev/cu.usbmodem14101 --fqbn $(BOARD) --input-dir $(BUILD) --verbose
clean:
rm -r build