Dependancies
Pre-requisites
🌳 An outdoor LoRa-GPS tracker with an E-Ink display 🔑
Transmit and receive GPS lat-long from a peer LoRa node
Dependancies
Pre-requisites

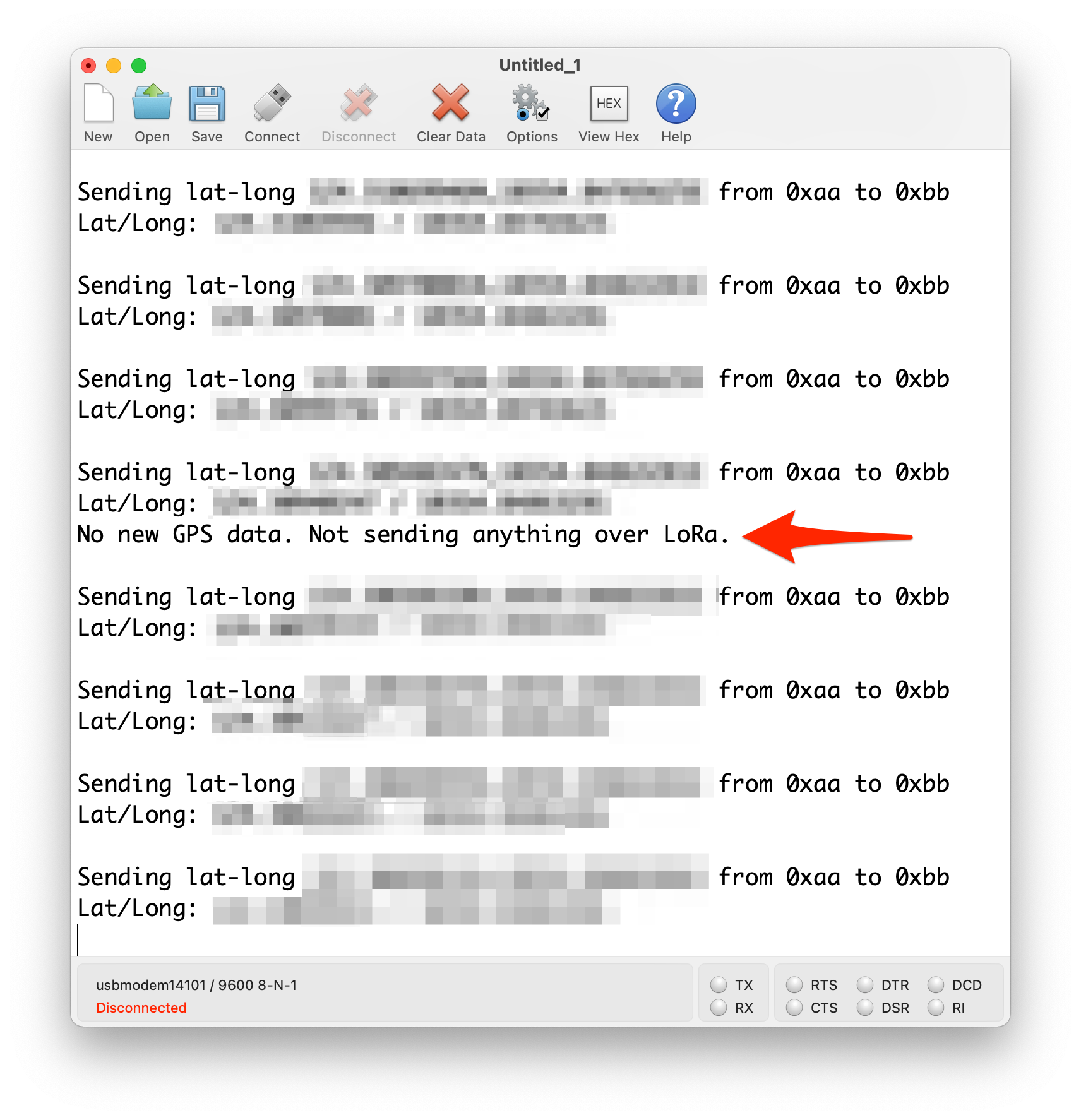
Run both nodes AA and BB at the same time to exchange their GPS location. They will not send any GPS data if the location remains the same.
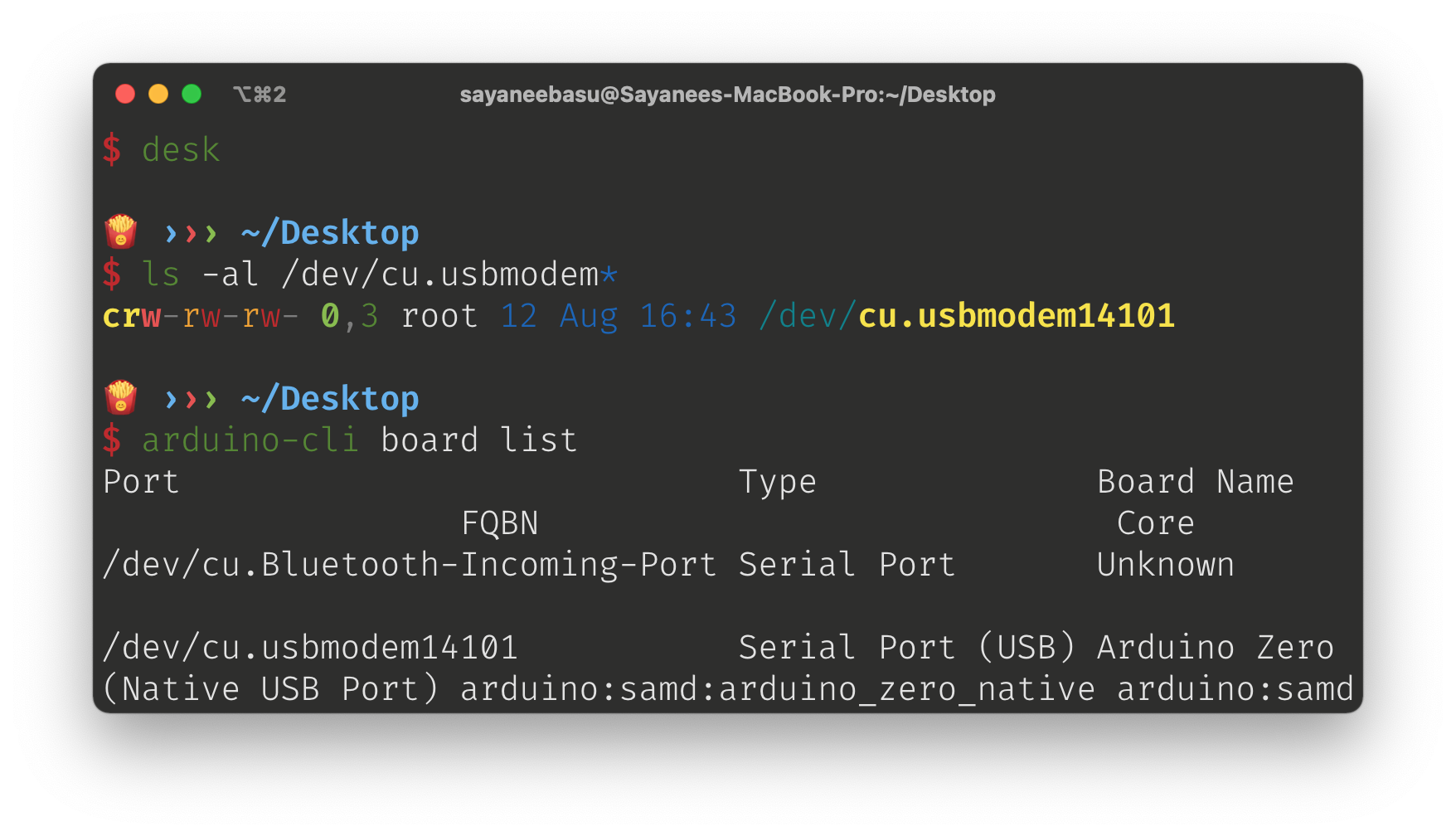
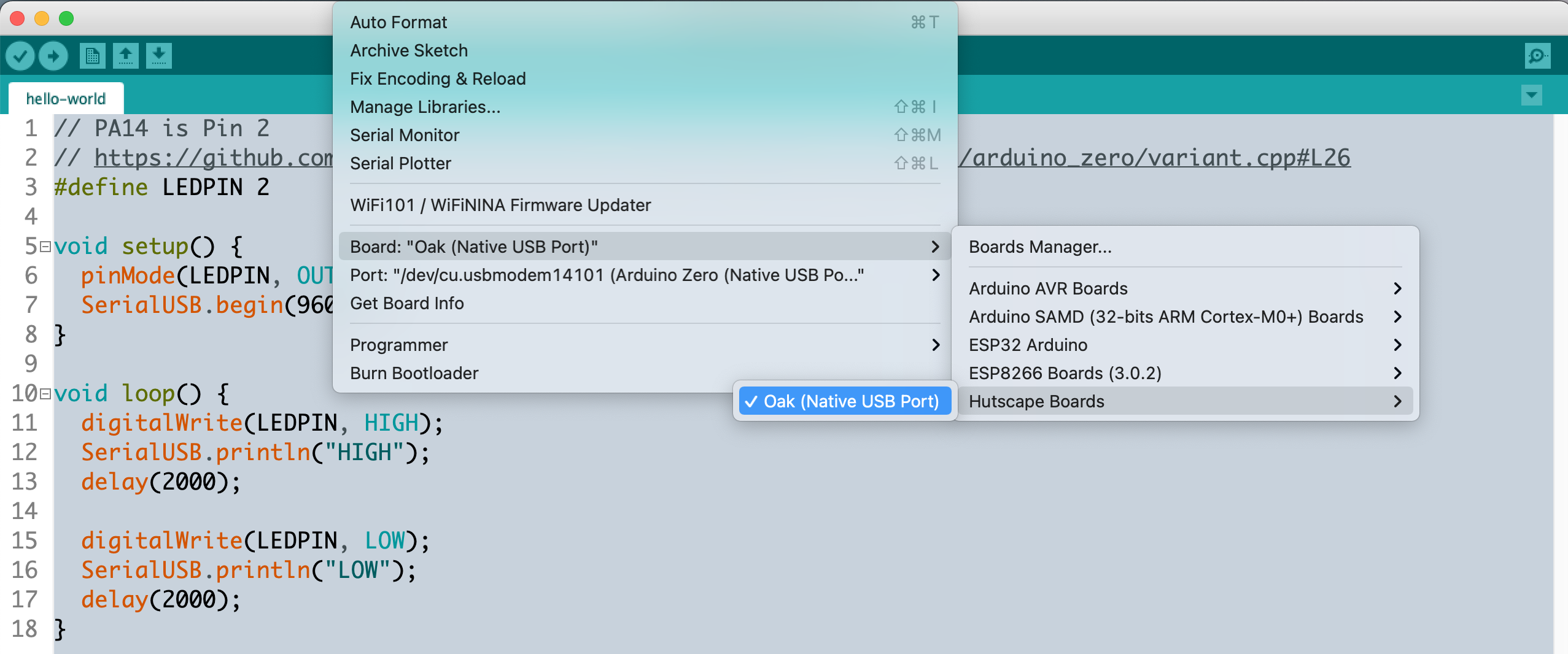
ls -al /dev/cu.usbmodem and arduino-cli board list. Run make to compile and upload the code to the board.
Serial output from the firmware.
#define DEBUG // Uncomment to enable verbose debug prints
#include "src/gps/gps.h"
#include "src/led/led.h"
#include "src/lora/lora.h"
byte localAddress = 0xAA;
byte destinationAddress = 0xBB;
long lastSendTime = 0;
int interval = 2000;
String incoming = "";
String gpsTime = "10:00:23";
String gpsDate = "2021-12-31";
String latlongInString = "";
LatLong latlong = {0.00, 0.00};
LatLong prevLatlong = {0.00, 0.00};
void setup() {
SerialUSB.begin(9600);
initLED();
SerialUSB.println("Starting LoRa duplex on node "
+ String(localAddress, HEX));
if (!initLoRa()) {
SerialUSB.println("Starting LoRa failed!");
}
initGPS();
}
void loop() {
if (millis() - lastSendTime > interval) {
if (hasNewGPSFix(&prevLatlong, &latlong)) {
convertLatLongToString(&latlong, latlongInString);
sendLoRa(latlongInString, localAddress, destinationAddress);
SerialUSB.print("\nSending lat-long " + latlongInString);
SerialUSB.print(" from 0x" + String(localAddress, HEX));
SerialUSB.println(" to 0x" + String(destinationAddress, HEX));
SerialUSB.println("Lat/Long: "
+ String(latlong.latitude, 8)
+ " / "
+ String(latlong.longitude, 8));
prevLatlong = latlong;
} else {
if (latlong->latitude == 0.00 && latlong->longitude == 0.00) {
SerialUSB.println("No GPS fix");
} else {
SerialUSB.println("No new GPS location");
}
}
lastSendTime = millis();
interval = random(2000) + 1000;
toggleLED();
}
if (receiveLoRa(LoRa.parsePacket(), localAddress, incoming)) {
SerialUSB.println("Received lat-long "
+ incoming
+ " from 0x"
+ String(destinationAddress, HEX)
+ " to 0x"
+ String(localAddress, HEX));
}
if (receivedGPSfix()) {
getLatLong(&latlong);
#ifdef DEBUG
printGPSinfo();
#endif
}
}
void printGPSinfo() {
getGPStime(gpsTime);
SerialUSB.println("\nTime: " + gpsTime);
getGPSdate(gpsDate);
SerialUSB.println("Date: " + gpsDate);
SerialUSB.println("Lat/Long: "
+ String(latlong.latitude, 8)
+ " / "
+ String(latlong.longitude, 8));
SerialUSB.println("GPS Fix? "
+ (int)getGPSfix());
SerialUSB.println("GPS Fix quality: "
+ (int)getGPSfixquality());
SerialUSB.println("Speed (knots): " + String(getGPSspeed()));
SerialUSB.println("Angle: " + String(getGPSangle()));
SerialUSB.println("Altitude: " + String(getGPSaltitude()));
SerialUSB.println("Satellites: " + String(getGPSsatellites()));
SerialUSB.println("Time [s] since last fix: "
+ String(getGPStimeSinceLastFix(), 3));
SerialUSB.println(" since last GPS time: "
+ String(getGPSlastTime(), 3));
SerialUSB.println(" since last GPS date: "
+ String(getGPSlastDate(), 3));
}BOARD?=hutscape:samd:oak
PORT := $(shell ls /dev/cu.usbmodem*)
BUILD=build
.PHONY: default lint all flash clean
default: lint all flash clean
lint:
cpplint --extensions=ino --filter=-legal/copyright,-whitespace/line_length,-readability/casting,-readability/todo,-runtime/int *.ino
all:
arduino-cli compile --fqbn $(BOARD) --output-dir $(BUILD) ./
flash:
arduino-cli upload -p $(PORT) --fqbn $(BOARD) --input-dir $(BUILD) --verbose
clean:
rm -r build