Dependancies
GPS fix with parsed lat-long
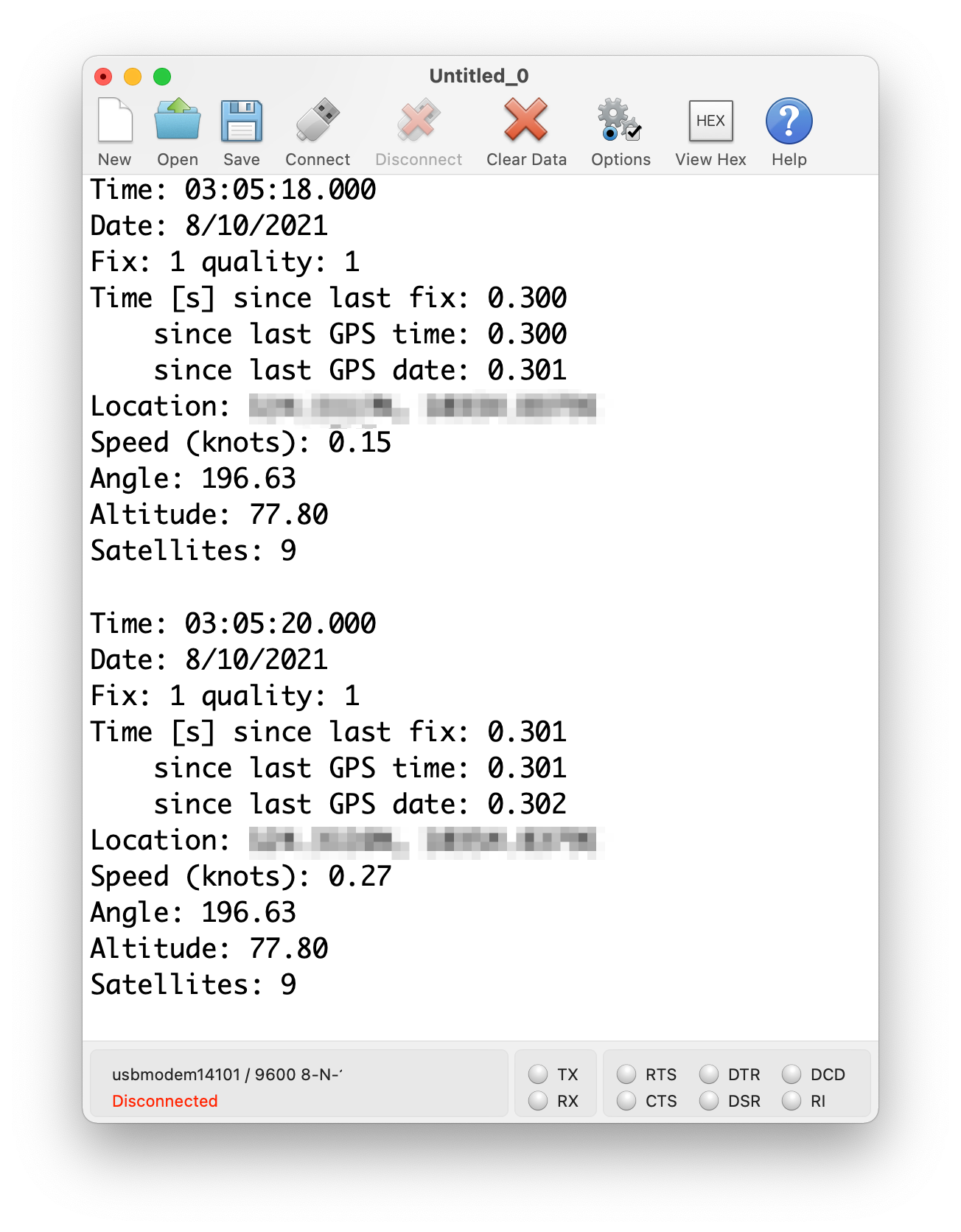
Display the parsed NMEA string information on the serial console after a successful GPS fix
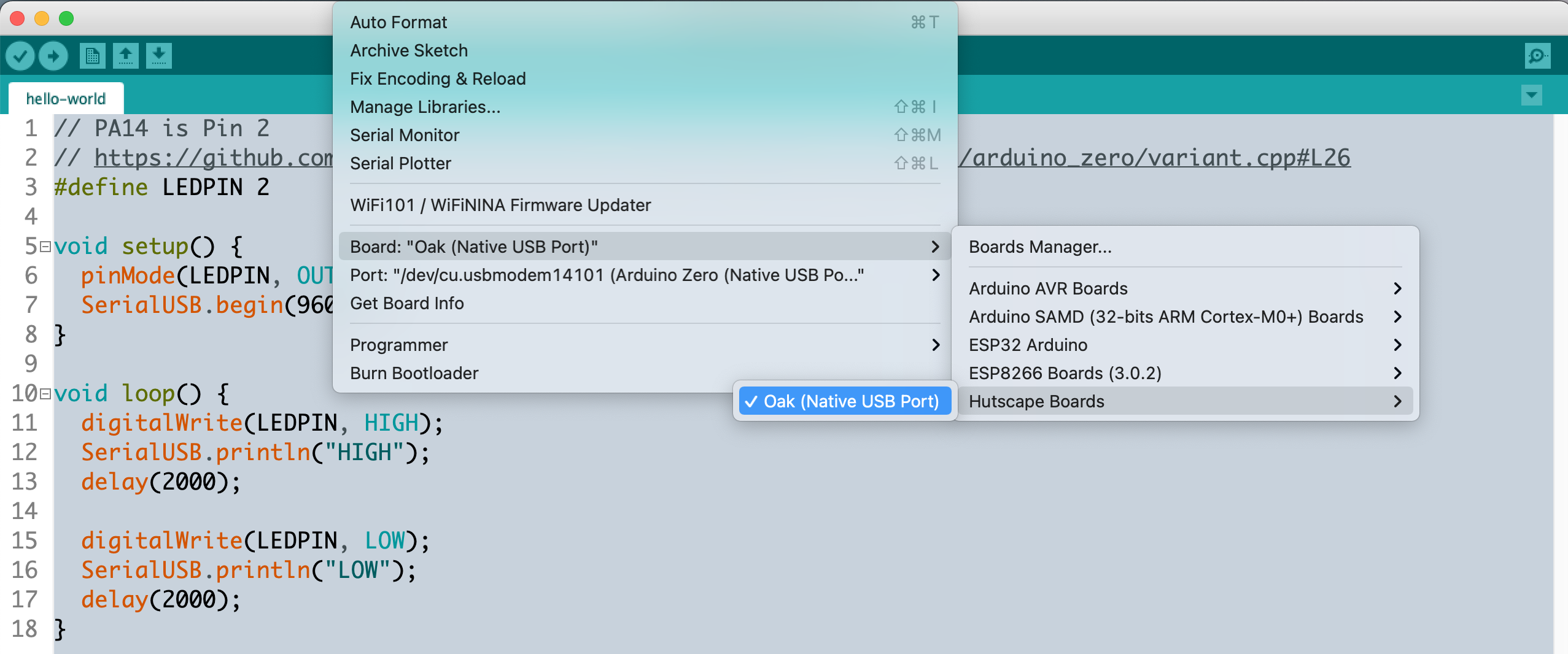
Before starting

🌳 An outdoor LoRa-GPS tracker with an E-Ink display 🔑
Display the parsed NMEA string information on the serial console after a successful GPS fix
Dependancies
Ensure you have access to the open skies for a potential GPS fix.
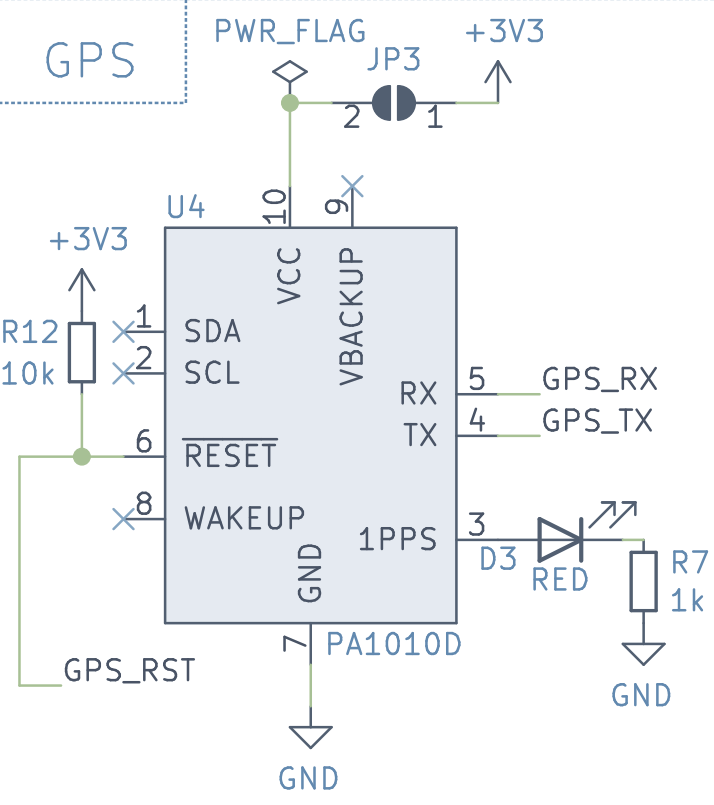
When the serial console shows the latitude and longitude information, the PPS Red LED should also blink once per second.
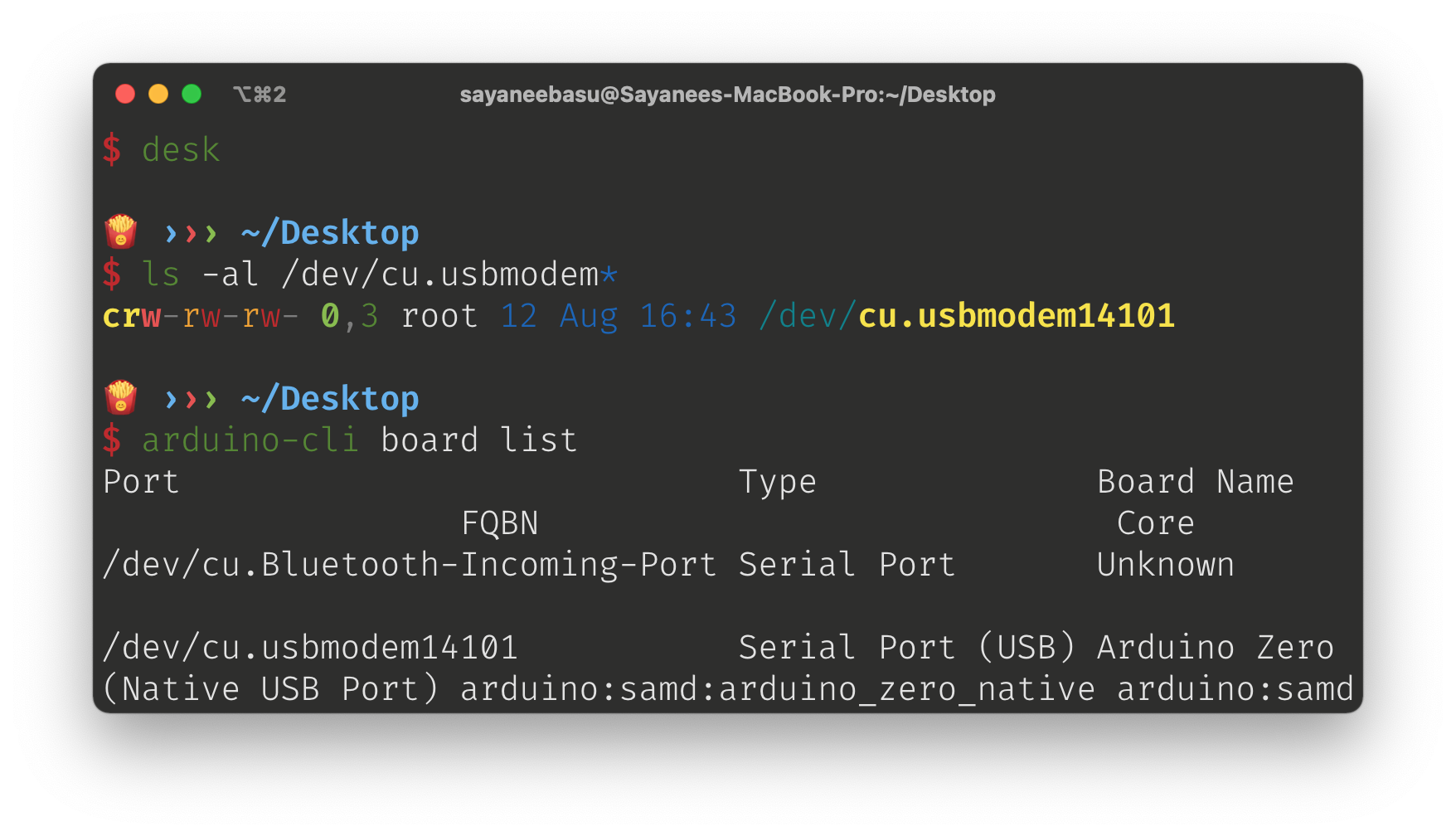
ls -al /dev/cu.usbmodem and arduino-cli board list. Run make to compile and upload the code to the board.
Serial output from the firmware.
Wire up the hardware accordingly
#include <Adafruit_GPS.h>
#define GPSSerial Serial1
Adafruit_GPS GPS(&GPSSerial);
#define GPSECHO false
#define LEDPIN 2
#define GPSRST 3
int ledState = 0;
uint32_t timer = millis();
void setup() {
SerialUSB.begin(9600);
SerialUSB.println("Adafruit GPS library basic test!");
// Initiate GPS
GPS.begin(9600);
GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCGGA);
GPS.sendCommand(PMTK_SET_NMEA_UPDATE_1HZ);
GPS.sendCommand(PGCMD_ANTENNA);
pinMode(GPSRST, OUTPUT);
digitalWrite(GPSRST, HIGH);
delay(1000);
// Initiate the LED pin as an output
pinMode(LEDPIN, OUTPUT);
digitalWrite(LEDPIN, ledState);
}
void loop() {
char c = GPS.read();
if (GPS.newNMEAreceived()) {
if (!GPS.parse(GPS.lastNMEA())) {
return;
}
}
if (millis() - timer > 2000) {
timer = millis();
SerialUSB.print("\nTime: ");
if (GPS.hour < 10) {
SerialUSB.print('0');
}
SerialUSB.print(GPS.hour, DEC);
SerialUSB.print(':');
if (GPS.minute < 10) {
SerialUSB.print('0');
}
SerialUSB.print(GPS.minute, DEC);
SerialUSB.print(':');
if (GPS.seconds < 10) {
SerialUSB.print('0');
}
SerialUSB.print(GPS.seconds, DEC);
SerialUSB.print('.');
if (GPS.milliseconds < 10) {
SerialUSB.print("00");
} else if (GPS.milliseconds > 9 && GPS.milliseconds < 100) {
SerialUSB.print("0");
}
SerialUSB.println(GPS.milliseconds);
SerialUSB.print("Date: ");
SerialUSB.print(GPS.day, DEC);
SerialUSB.print('/');
SerialUSB.print(GPS.month, DEC);
SerialUSB.print("/20");
SerialUSB.println(GPS.year, DEC);
SerialUSB.print("Fix: ");
SerialUSB.print((int)GPS.fix);
SerialUSB.print(" quality: ");
SerialUSB.println((int)GPS.fixquality);
SerialUSB.print("Time [s] since last fix: ");
SerialUSB.println(GPS.secondsSinceFix(), 3);
SerialUSB.print(" since last GPS time: ");
SerialUSB.println(GPS.secondsSinceTime(), 3);
SerialUSB.print(" since last GPS date: ");
SerialUSB.println(GPS.secondsSinceDate(), 3);
SerialUSB.print("Location: ");
SerialUSB.print(GPS.latitude, 8);
SerialUSB.print(GPS.lat);
SerialUSB.print(", ");
SerialUSB.print(GPS.longitude, 8);
SerialUSB.println(GPS.lon);
SerialUSB.print("Speed (knots): ");
SerialUSB.println(GPS.speed);
SerialUSB.print("Angle: ");
SerialUSB.println(GPS.angle);
SerialUSB.print("Altitude: ");
SerialUSB.println(GPS.altitude);
SerialUSB.print("Satellites: ");
SerialUSB.println((int)GPS.satellites);
// LED Toggle
ledState = !ledState;
digitalWrite(LEDPIN, ledState);
}
}BOARD?=hutscape:samd:oak
PORT := $(shell ls /dev/cu.usbmodem*)
BUILD=build
.PHONY: default lint all flash clean
default: lint all flash clean
lint:
cpplint --extensions=ino --filter=-legal/copyright,-whitespace/line_length,-readability/casting,-readability/todo *.ino
all:
arduino-cli compile --fqbn $(BOARD) --output-dir $(BUILD) ./
flash:
arduino-cli upload -p $(PORT) --fqbn $(BOARD) --input-dir $(BUILD) --verbose
clean:
rm -r build