Dependancies
Pre-requisites
🌳 An outdoor LoRa-GPS tracker with an E-Ink display 🔑
Display lat-long and Haversine distance
Dependancies
Pre-requisites

Display rotated information on the E-Ink as an example to display the various information such as latitude, longitude, Haversine distance and last timestamp.
This example uses Version 1 of WaveShare 1.54inch E-Ink module.
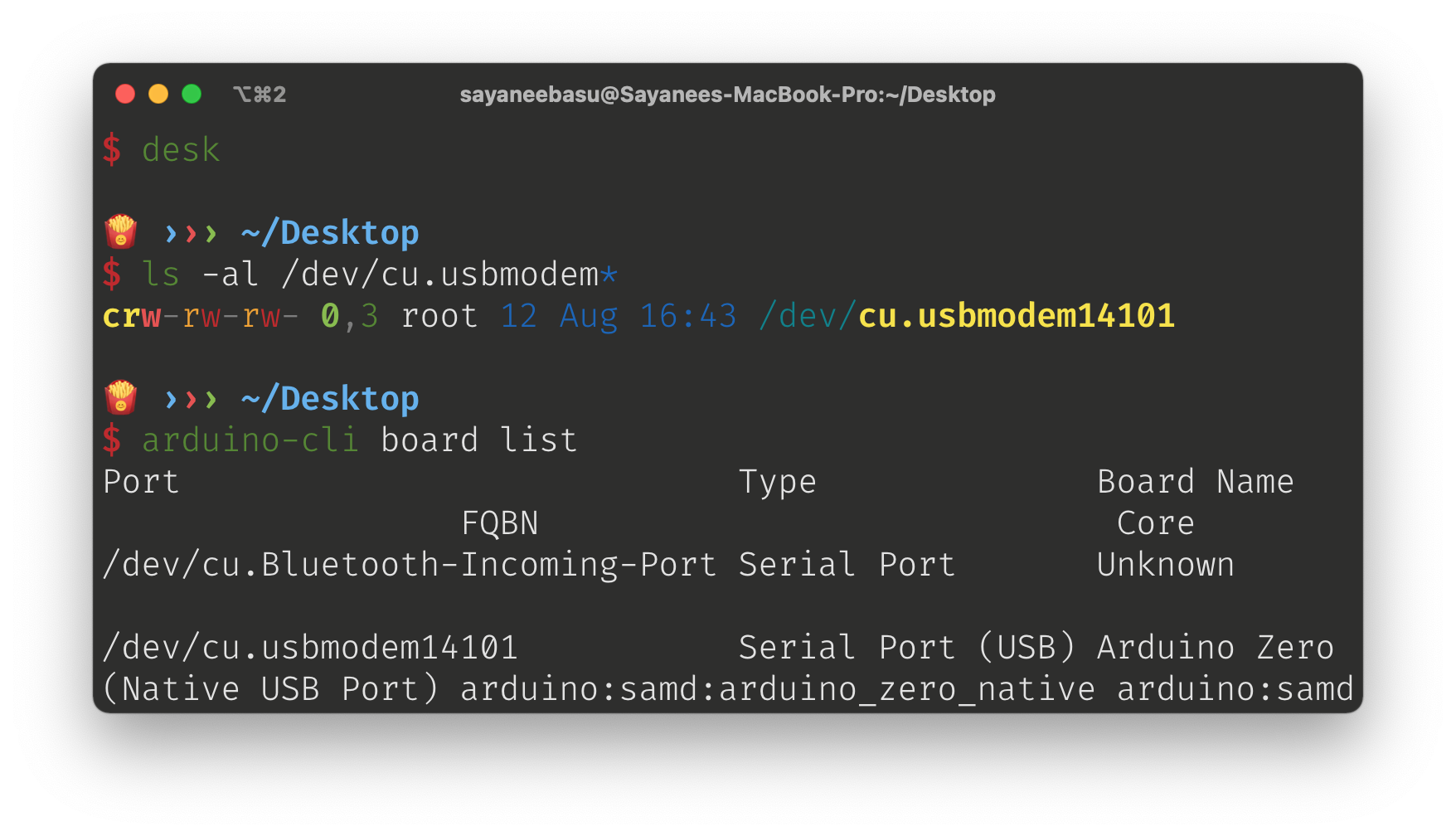
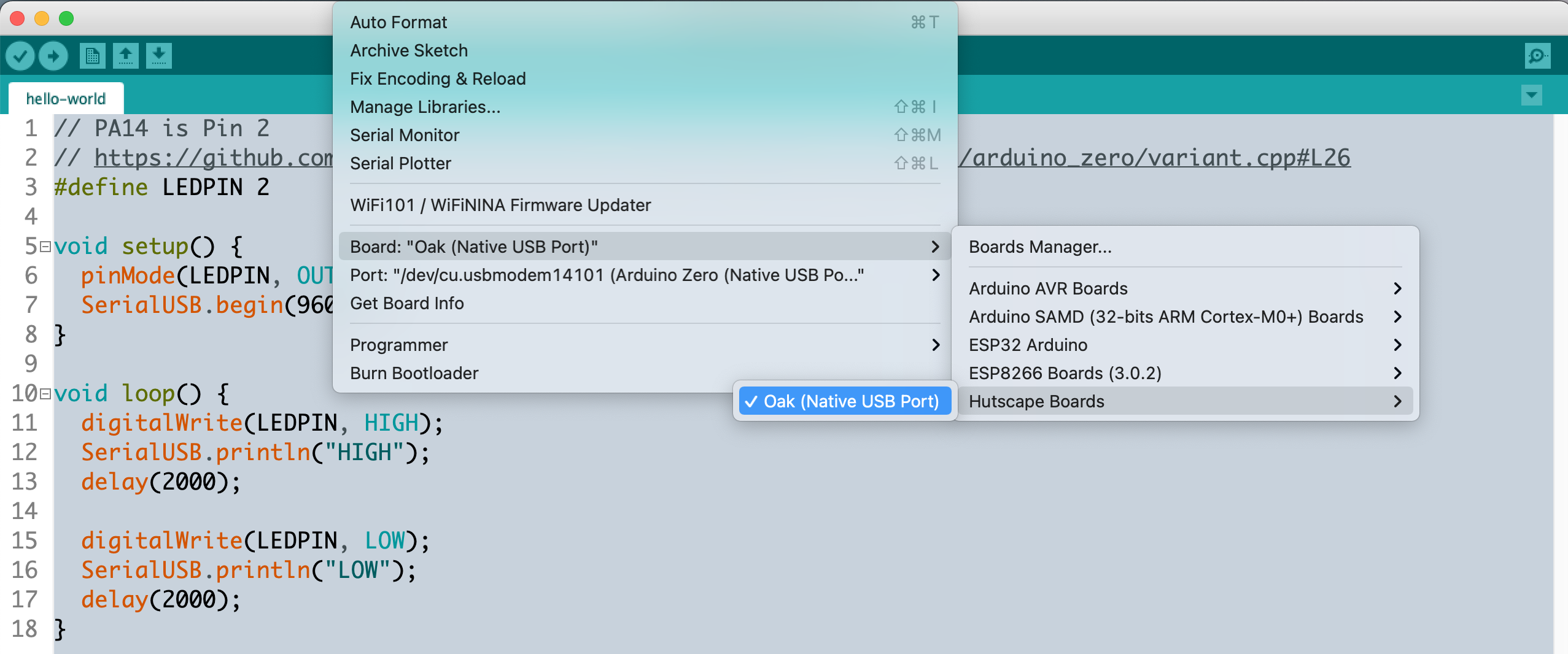
ls -al /dev/cu.usbmodem and arduino-cli board list. Run make to compile and upload the code to the board.
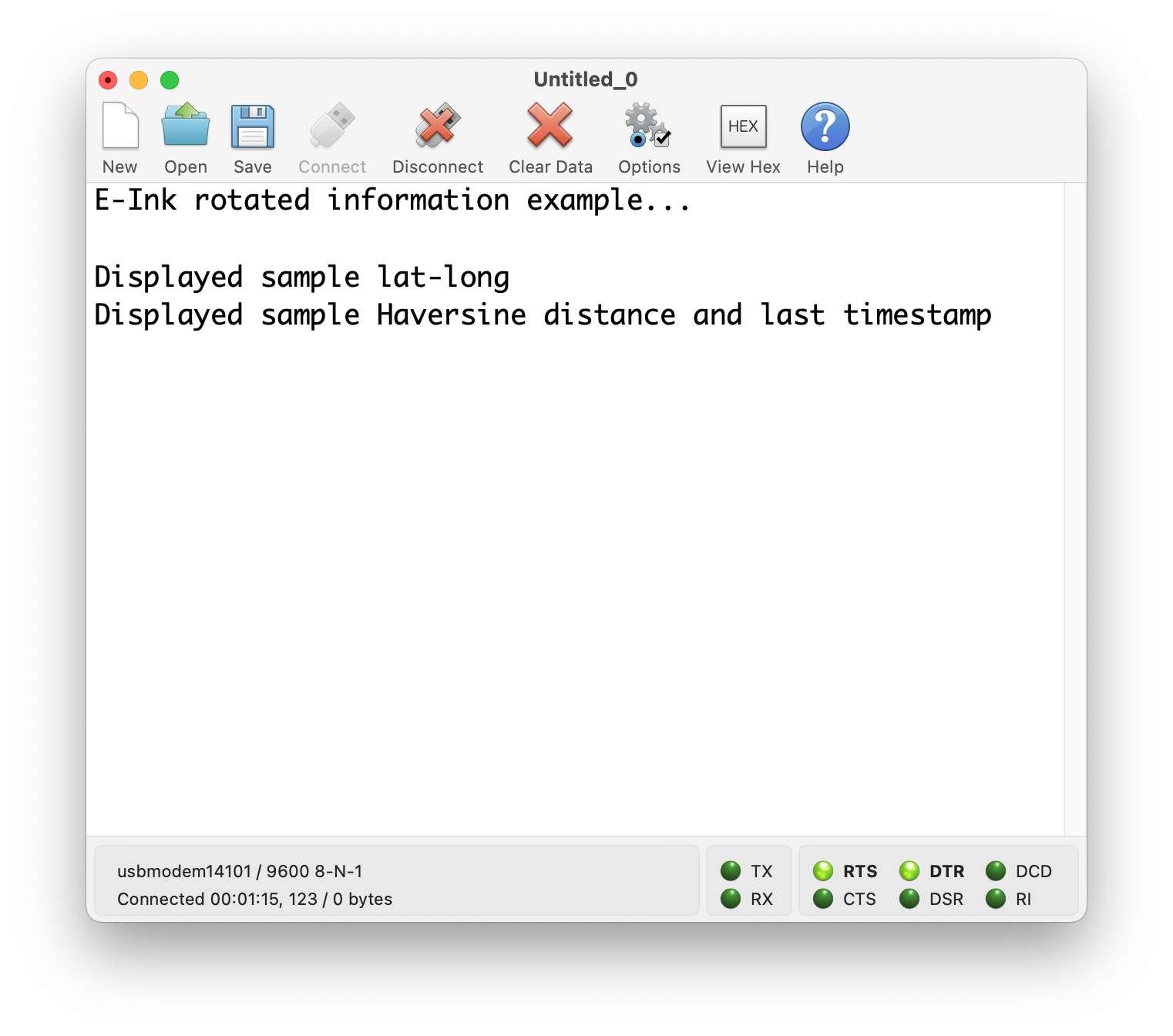
Serial output from the firmware.
#include <SPI.h>
#include "epd1in54.h"
#include "epdpaint.h"
#define COLORED 0
#define UNCOLORED 1
const char latlong[] = "1.40N, 103.91E";
const char haversine[] = "300m";
const char last_timestamp[] = "00:10 ago";
unsigned char image[1024];
Paint paint(image, 0, 0);
Epd epd;
unsigned long time_start_ms;
unsigned long time_now_s;
void setup() {
SerialUSB.begin(9600);
SerialUSB.println("E-Ink rotated information example... \n");
if (epd.Init(lut_full_update) != 0) {
SerialUSB.println("e-Paper init failed");
return;
}
epd.ClearFrameMemory(0xFF);
epd.DisplayFrame();
epd.ClearFrameMemory(0xFF);
epd.DisplayFrame();
paint.SetRotate(ROTATE_0);
paint.SetWidth(200);
paint.SetHeight(24);
paint.Clear(COLORED);
paint.DrawStringAt(10, 4, "Current position", &Font16, UNCOLORED);
epd.SetFrameMemory(
paint.GetImage(), 0, 10, paint.GetWidth(), paint.GetHeight());
paint.Clear(UNCOLORED);
paint.DrawStringAt(20, 4, latlong, &Font16, COLORED);
epd.SetFrameMemory(
paint.GetImage(), 0, 30, paint.GetWidth(), paint.GetHeight());
SerialUSB.println("Displayed sample lat-long");
paint.SetWidth(50);
paint.SetHeight(120);
paint.SetRotate(ROTATE_270);
paint.Clear(COLORED);
paint.DrawStringAt(15, 6, haversine, &Font24, UNCOLORED);
paint.DrawStringAt(15, 34, last_timestamp, &Font16, UNCOLORED);
epd.SetFrameMemory(paint.GetImage(),
80, 72, paint.GetWidth(), paint.GetHeight());
SerialUSB.println("Displayed sample Haversine distance and last timestamp");
epd.DisplayFrame();
delay(1000);
}
void loop() {}BOARD?=hutscape:samd:oak
PORT := $(shell ls /dev/cu.usbmodem*)
BUILD=build
.PHONY: default lint all flash clean
default: all flash clean
all:
arduino-cli compile --fqbn $(BOARD) --output-dir $(BUILD) ./
flash:
arduino-cli upload -p $(PORT) --fqbn $(BOARD) --input-dir $(BUILD) --verbose
clean:
rm -r build