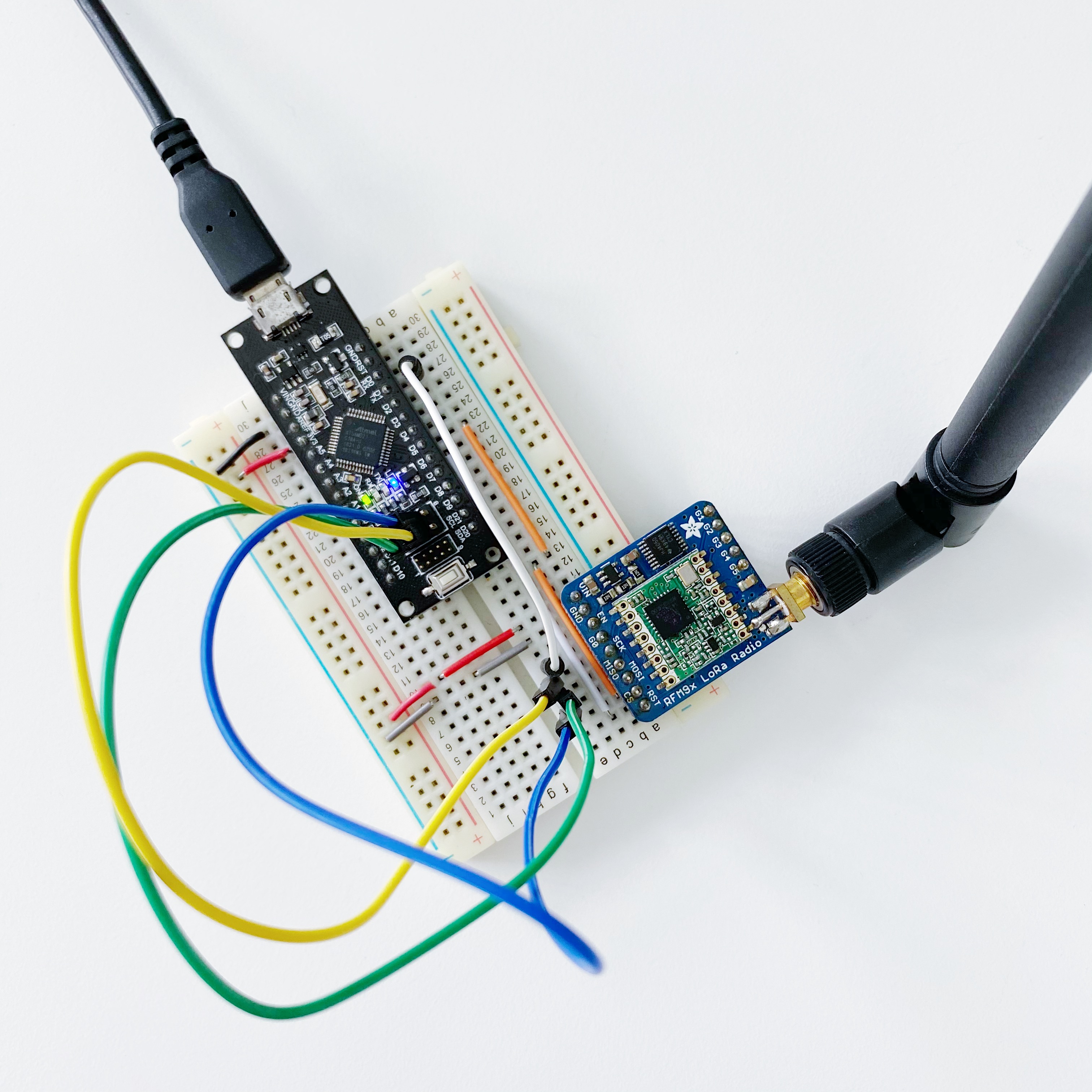
Prototype
A photo of the actual setup.
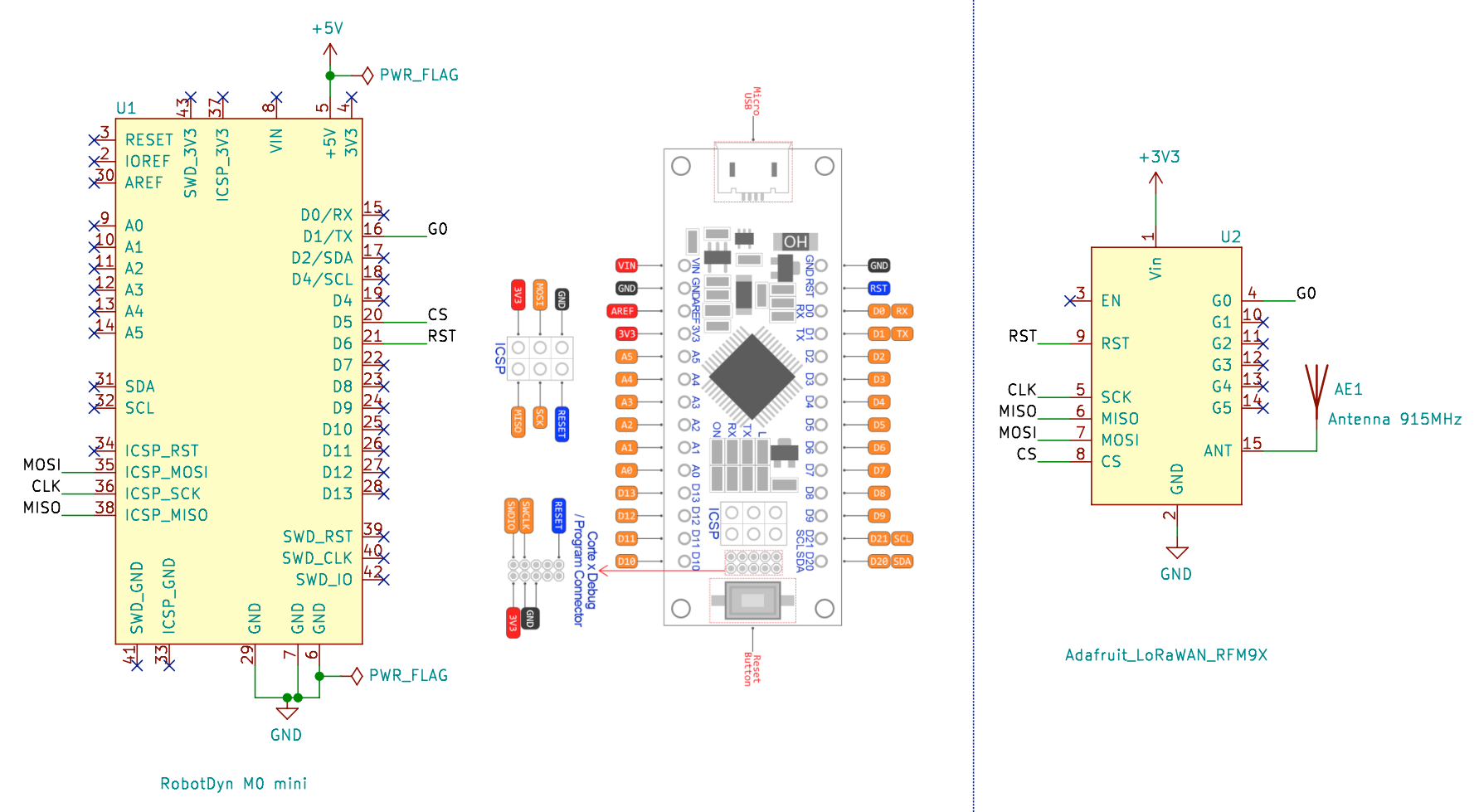
Schematic
Wire up the hardware accordingly
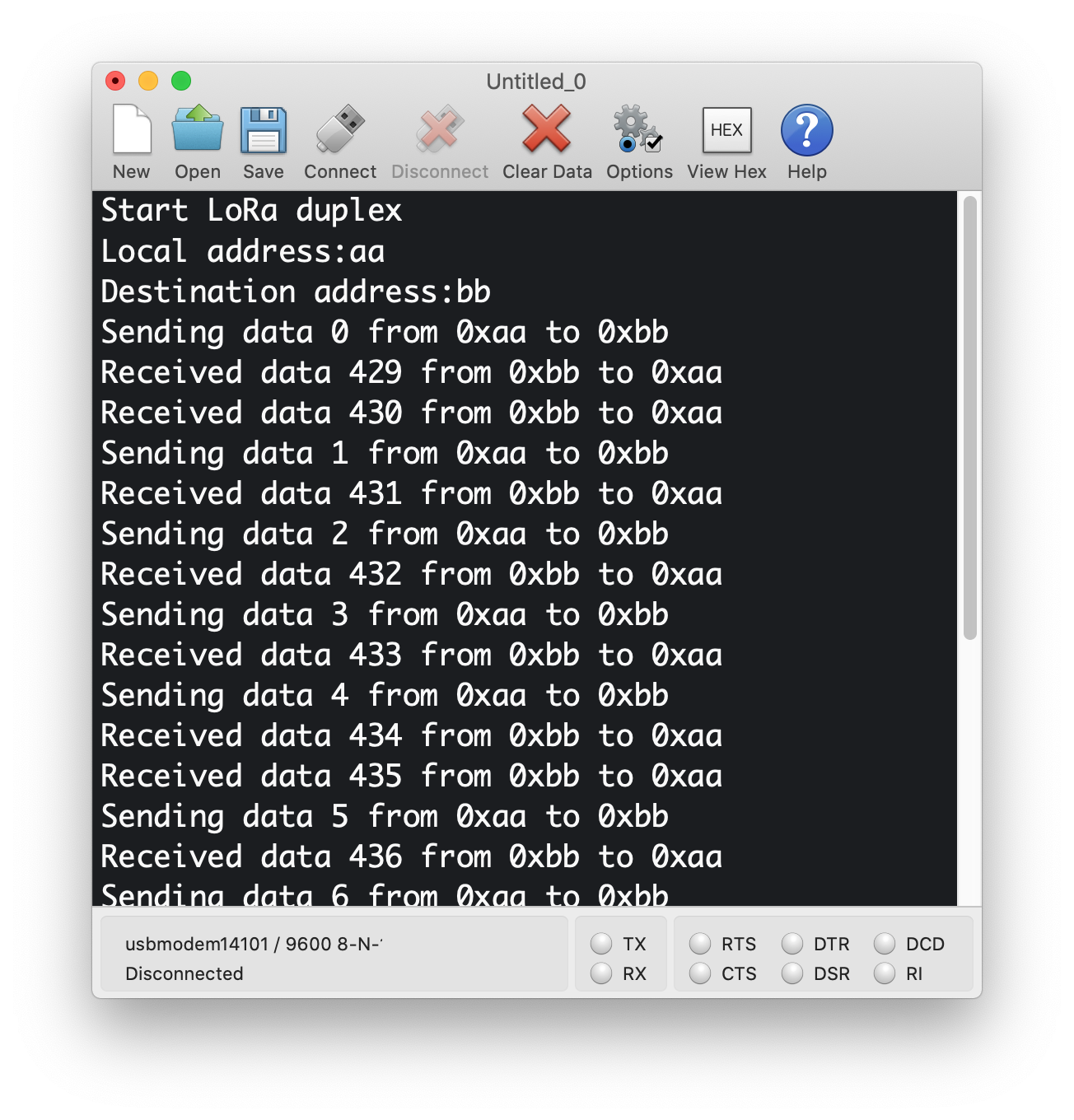
Serial console
Serial output from the firmware.
Dependancies
Pre-requisites
lora-duplex-samd21g.ino
#include <SPI.h>
#include <LoRa.h>
const int csPin = 5;
const int resetPin = 6;
const int irqPin = 1; // alternate pin: D11
byte localAddress = 0xAA;
byte destinationAddress = 0xBB;
long lastSendTime = 0;
int interval = 2000;
int count = 0;
void setup() {
SerialUSB.begin(9600);
while (!SerialUSB) { }
delay(100);
SerialUSB.println("Start LoRa duplex");
SerialUSB.print("Local address:");
SerialUSB.println(String(localAddress, HEX));
SerialUSB.print("Destination address:");
SerialUSB.println(String(destinationAddress, HEX));
LoRa.setPins(csPin, resetPin, irqPin);
if (!LoRa.begin(433E6)) {
SerialUSB.println("LoRa init failed. Check your connections.");
while (true) {}
}
}
void loop() {
if (millis() - lastSendTime > interval) {
String sensorData = String(count++);
sendMessage(sensorData);
SerialUSB.print("Sending data " + sensorData);
SerialUSB.print(" from 0x" + String(localAddress, HEX));
SerialUSB.println(" to 0x" + String(destinationAddress, HEX));
lastSendTime = millis();
interval = random(2000) + 1000;
}
receiveMessage(LoRa.parsePacket());
}
void sendMessage(String outgoing) {
LoRa.beginPacket();
LoRa.write(destinationAddress);
LoRa.write(localAddress);
LoRa.write(outgoing.length());
LoRa.print(outgoing);
LoRa.endPacket();
}
void receiveMessage(int packetSize) {
if (packetSize == 0) return;
int recipient = LoRa.read();
byte sender = LoRa.read();
byte incomingLength = LoRa.read();
String incoming = "";
while (LoRa.available()) {
incoming += (char)LoRa.read();
}
if (incomingLength != incoming.length()) {
SerialUSB.println("Error: Message length does not match length");
return;
}
if (recipient != localAddress) {
SerialUSB.println("Error: Recipient address does not match local address");
return;
}
SerialUSB.print("Received data " + incoming);
SerialUSB.print(" from 0x" + String(sender, HEX));
SerialUSB.println(" to 0x" + String(recipient, HEX));
}BOARD?=arduino:samd:mzero_bl
PORT := $(shell ls /dev/cu.usbmodem*)
BUILD=build
.PHONY: default lint all flash clean
default: lint all flash clean
lint:
cpplint --extensions=ino --filter=-legal/copyright,-readability/casting,-runtime/int,-whitespace/line_length *.ino
all:
arduino-cli compile --fqbn $(BOARD) --output-dir $(BUILD) ./
flash:
arduino-cli upload --fqbn $(BOARD) --port $(PORT) --input-dir $(BUILD)
clean:
rm -r buildA photo of the actual setup.
Wire up the hardware accordingly
Serial output from the firmware.
Send and receive at the same time from another node! Use this code with duplex b.
Take note of the actual SPI pins used on SAMD21G.
{ PORTA, 12, PIO_SERCOM_ALT, PIN_ATTR_DIGITAL, No_ADC_Channel, NOT_ON_PWM, NOT_ON_TIMER, EXTERNAL_INT_12 }, // MISO: SERCOM4/PAD[0] PA12
{ PORTB, 11, PIO_SERCOM_ALT, PIN_ATTR_DIGITAL, No_ADC_Channel, NOT_ON_PWM, NOT_ON_TIMER, EXTERNAL_INT_11 }, // SCK: SERCOM4/PAD[3] PB11
{ PORTB, 10, PIO_SERCOM_ALT, PIN_ATTR_DIGITAL, No_ADC_Channel, NOT_ON_PWM, NOT_ON_TIMER, EXTERNAL_INT_10 }, // MOSI: SERCOM4/PAD[2] PB10
![]https://hutscape.com/assets/images/tutorials/lora-duplex-samd21g-pin-mux.png)
As noted in the error of the RobotDyn M0 mini board:
There is a “ICSP” header, with pin assignments that look wrong on the schematic. I suspect the MISO pin on the header is really PA12, not D12. More to explore.
{kind=link}